So The professor says that the state of topology so far, is as follows: Suppose you collect all the topological notions/properties/classifications that mathematicians have derived, This set of notions is not a classifier on topological spaces, In particular, if is the set of all topological notions, and and are topological spaces, such that There exists a subset of notions such that . both EXACTLY satisfy and nothing else, we still cannot guarantee a homeomorphism between and .
From the physical perspective, most topological spaces are not good notions of what we would think of as space-time. Enter Manifolds: They are topological spaces that can be "charted" in an analogous way to earth being charted by an Atlas.
Topological Manifolds
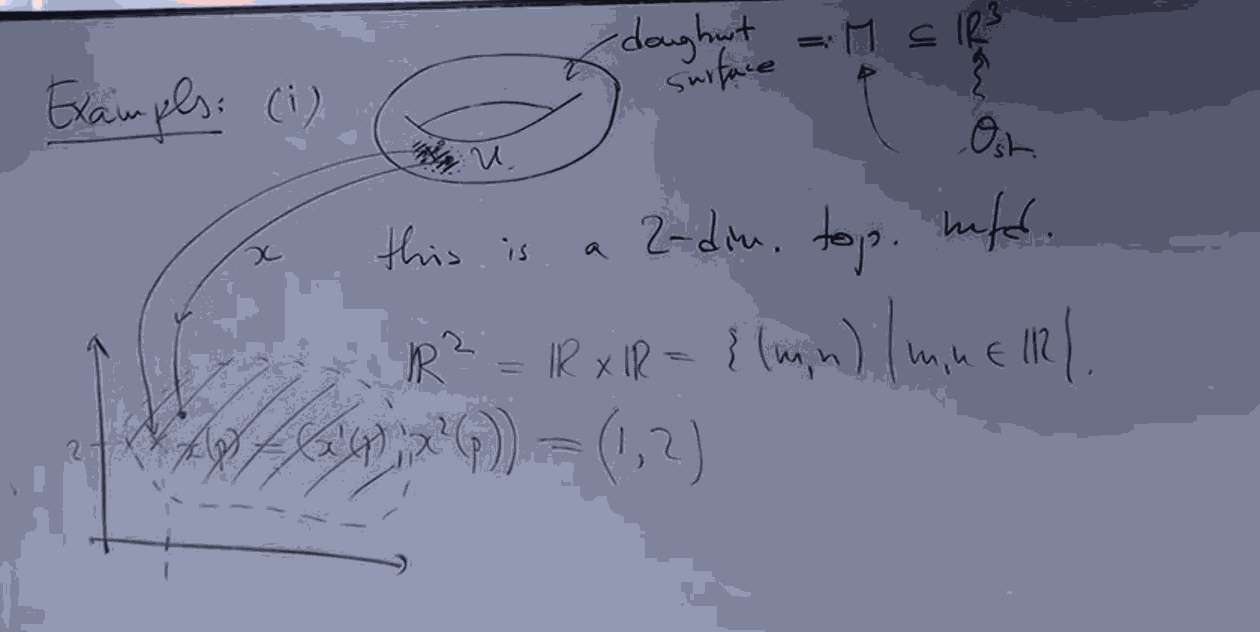
A topological space is a -dimensional manifold if such that such that there exists a map such that is a homeomorphism putting the subspace topology (of the standard topology on ) on .
In other words, put the standard topology on , and take any point , there must be an open set around , and a map from to a subset of such that if you put the subspace topology on , the map is bijective, continuous, and has a continuous inverse.
For any point , the tuple with the properties described above is called a "chart", the set of all charts is called an atlas.
chart, atlas, co-ordinate map
let be a dimensional manifold. The pair is a chart if is a homeomorphism from an open set to , putting the subspace of the standard topology on . writing The maps are called the co-ordinate maps. the set of charts is called an atlas iff .
A few notes: first of all if is a chart, by definition, is open in its own topology, as we are putting the subspace topology inheriting from the standard one on
Chart transition map.
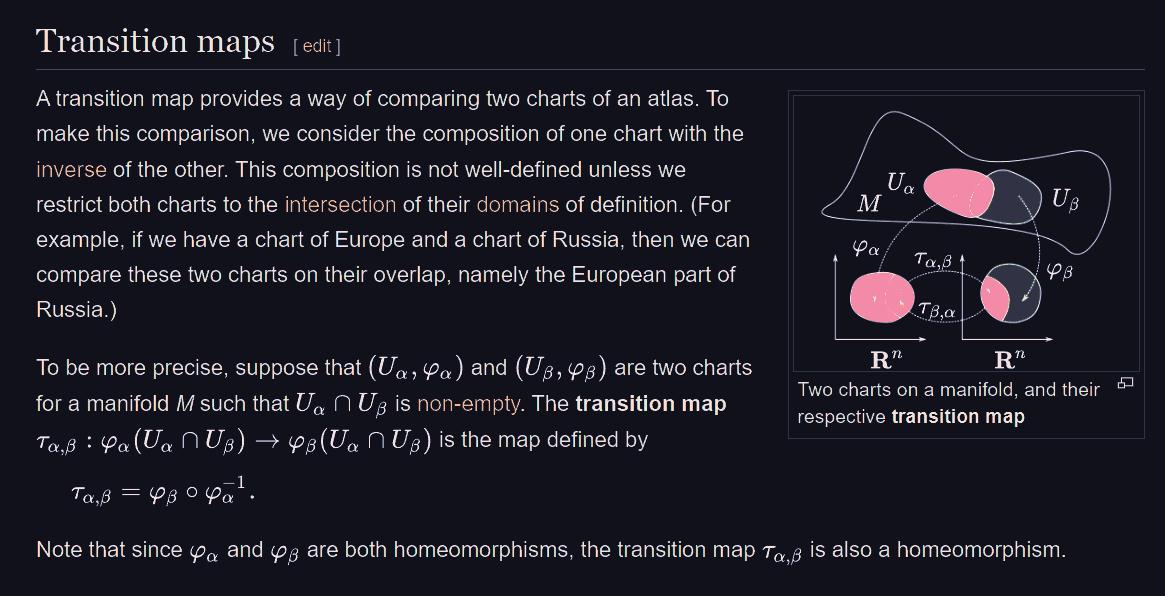
Consider the atlas of a manifold . Now we can think about each chart as a page of the atlas, if the atlas is a book. Suppose you take two pages and notice that these is an overlap on the points on the manifold that these pages "chart", and you want some instruction to glue together overlapping points, informally the chart transition map is such a gluing instruction.
More formally, if is non empty, we have the below commutative diagram![[Support/Figures/Pasted image 20250124174722.png#]]
That is, if we want to go from , since is a homeomorphism, we can invert it (inverse function), to get to the pre-image , and then take to get to . since is a homeomorphism from , it is also a homeomorphism from . This is simply because has its subspace topology inherited from , and is a subset of , putting the subspace topology on , inherited from , The restricted map is a homomorphism from to , the restricted map is also bijective. in this case, and since the inverse map also is a homomorphism, the restricted inverse map is also a homomorphism, hence totally, is a HOMEOMORPHISM. Similarly, is also a HOMEOPORPHISM from . But this means that is a homeomorphism from to . The composition of the two homeomorphism is this a homeomorphism from to , both of which taking subspace topologies inheriting from with the standard topology.
Manifold philosophy.
The rough idea is that the real world "space-time" is some sort of topological manifold . For simplicity sake, consider to be topological manifold of the earth. (we don't really need to say exactly what kind for the following argument)
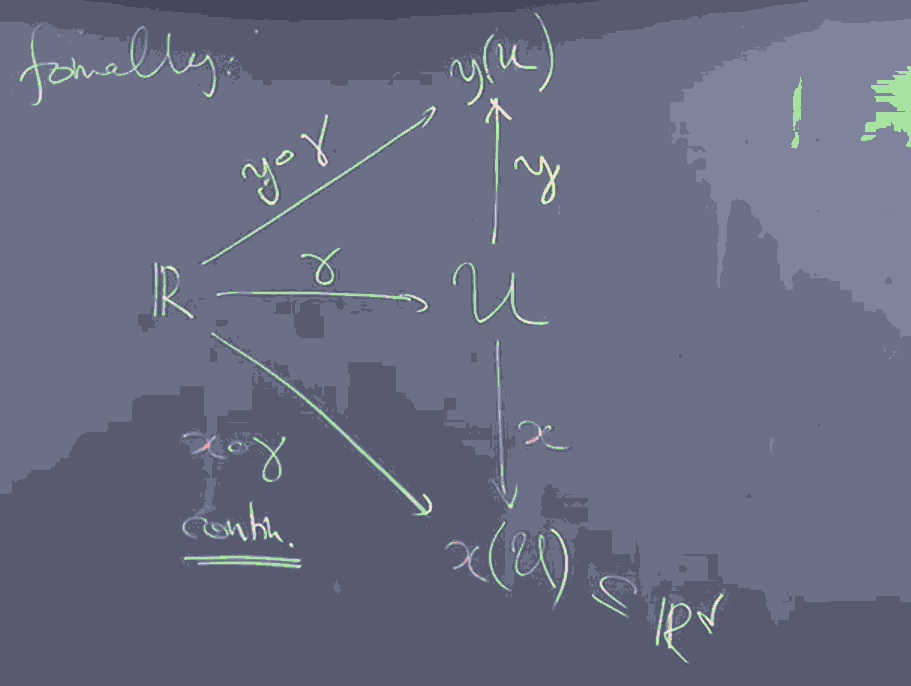
Suppose that there is a ship, with a trajectory , where is some open set in the "real-world" earth manifold, (Say a part of the ocean, that we are traversing) and the trajectory is parametrized by the real numbers. Now, is a trajectory in the real world. However, it would be really nice, if we take some chart and consider "charting" the trajectory , which in the charted world, lives as curve , wouldn't it be nice if we could look at some property of (say continuity), and LIFT that definition into the real world, in the sense that the continuity of ITSELF is defined from the continuity in the charted world . Well, certainly so, charts are easy to deal with, but charts are also a FIGMENT OF OUR IMAGINATION, AND MORE OR LESS, WE CAN PICK THEM ARBITRARILY, IN this case our LIFTED INTO THE REAL WORLD NOTION of continuity of defined as the continuity of the charted curve better be independent of our charting function , then no matter what charting we pick on , we can safely say that the definition is not ill defined. Consider the comm diagram below:
In the diagram above, we define "continuity" of as : is continuous iff is continuous (in the undergraduate continuity of real vector space maps). If this was the case, then it better be that for some other choice of charting function , also be continuous (in the undergraduate sense again)
For the case of continuity, this holds good, because . And the chart transition map is continuous in the topological sense. And is also continuous in the topological sense, as the vector space real continuity can be though of as a special case of topological continuity. Sot the composition of two continuous function is continuous, and in this case we are happy. (In FACT ONE CAN VERIFY THAT THIS "DEFINED" continuity of is actually consistent with the continuity of in the topological sense, putting the standard topology on and the subspace toplogy on inhereted from ).
But how about differentiability, well there is no direct definition of differentiability of (from real line to an open subset of a topological space), so we can't verify, and we just have to "BY DEFENITION" go with " is (defined to be) differentiable if the charted map is differentiable in the sense maps between two real vector spaces".
There is however A BIG PROBLEM, charting maps are ONLY continuous, so we need to define a notion of differentiability on charting maps, then throw out all the charts that are not differentiable, then we can apply an argument along the lines of
, and is a differentiable transition map, and is differentiable, so is too, hence our notion of real world differentiability of the ship trajectory is independent of the imaginary notion of charts we pick.
So there is some sense of increasing information
Set to topology: List the open subsets in accordance to the axioms of topology (stable under arbitrary union, finite intersection, and so on)
topology to manifold: list an atlas of charts, which cover the entire manifold, and each charted region comes with a map that is locally homeomorphic to subset of the Euclidean real space.
manifold to differentiable manifold: define a notion of differentiability of chart maps, and throw away charts that are not differentiable and still get a valid atlas.